|
Description: Existing volumetric capture systems require many
cameras and lengthy post processing.
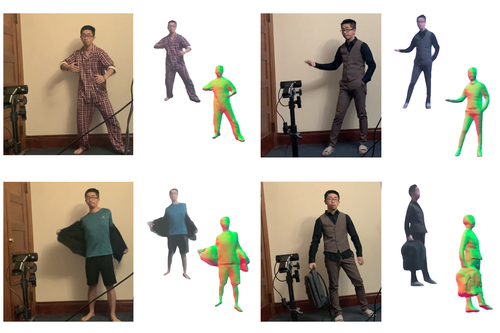
We introduce the first system that can capture a
completely clothed human body (including the back)
using a single RGB
webcam and in real time. Our deep-learning-based
approach enables new possibilities for low-cost and
consumer-accessible immersive teleportation.
|
|
Overview
We present the first approach to volumetric
performance capture and novel-view
rendering at real-time speed from monocular video,
eliminating the need for
expensive multi-view systems or cumbersome
pre-acquisition of a personalized
template model. Our system reconstructs a fully
textured 3D human from each
frame by leveraging Pixel-Aligned Implicit Function
(PIFu). While PIFu achieves
high-resolution reconstruction in a memory-efficient
manner, its computationally
expensive inference prevents us from deploying such
a system for real-time applications.
To this end, we propose a novel hierarchical surface
localization algorithm and a direct
rendering method without explicitly extracting
surface meshes. By culling unnecessary
regions for evaluation in a coarse-to-fine manner,
we successfully accelerate the
reconstruction by two orders of magnitude from the
baseline without compromising the quality.
Furthermore, we introduce an Online Hard Example
Mining (OHEM) technique that effectively
suppresses failure modes due to the rare occurrence
of challenging examples. We adaptively
update the sampling probability of the training data
based on the current reconstruction
accuracy, which effectively alleviates
reconstruction artifacts.
Our experiments and evaluations demonstrate the
robustness of our system to various
challenging angles, illuminations, poses, and
clothing styles. We also show that our
approach compares favorably with the
state-of-the-art monocular performance capture.
|
|
We propose a novel hierarchical surface localization algorithm and a direct rendering method that progressively queries 3D locations in a coarse-to-fine manner and to extract surface from implicit occupancy fields with a minimum number of points to be evaluate. By culling unnecessary regions for evaluation we successfully accelerate the reconstruction by nearly 200 times without compromising the quality.
We introduce an Online Hard Example Mining (OHEM) technique that effectively suppresses failure modes due to the rare occurrence of challenging examples. We adaptively update the sampling probability of the training data based on the current reconstruction accuracy, which effectively alleviates reconstruction artifacts.
@article{li2020monocular,
title={Monocular Real-Time Volumetric Performance Capture},
author={Li, Ruilong and Xiu, Yuliang and Saito, Shunsuke and Huang, Zeng and Olszewski, Kyle and Li, Hao},
journal={arXiv preprint arXiv:2007.13988},
year={2020}
}
@inproceedings{10.1145/3407662.3407756,
author = {Li, Ruilong and Olszewski, Kyle and Xiu, Yuliang and Saito, Shunsuke and Huang, Zeng and Li, Hao},
title = {Volumetric Human Teleportation},
year = {2020},
isbn = {9781450380607},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3407662.3407756},
doi = {10.1145/3407662.3407756},
booktitle = {ACM SIGGRAPH 2020 Real-Time Live!},
articleno = {9},
numpages = {1},
location = {Virtual Event, USA},
series = {SIGGRAPH 2020}
}